
该机械臂电路也可以像机器人起重机一样实现,使用6个伺服电机工作,并可以通过一个单片机的远程控制,使用Arduino基于2.4 GHz的通信链路。
主要特点
当你在制造像机械臂这样复杂的东西时,它必须看起来很现代,必须包含许多先进的功能,而不仅仅是像玩具一样的功能。
拟议中的完整设计相对容易建造,但它具有一些先进的机动功能,可以通过无线或远程控制命令进行精确控制。该设计甚至兼容工业使用,如果电机适当升级。
这种像机械臂一样的机械起重机的主要特点是:
- 连续可调“手臂”超过180度垂直轴。
- 连续可调“弯头”超过180度垂直轴。
- 连续可调的“手指捏”或手柄超过90度垂直轴。
- 连续可调的“手臂”超过180度水平面。
- 整个机器人系统或起重机臂是可移动的和可操作的,就像遥控车.
粗糙的仿真工作
上面解释的几个功能可以通过下面的GIF仿真查看和理解:

运动机制的位置
下图为我们提供了项目实施中需要安装的各种电机位置和相关齿轮机构的清晰图片:
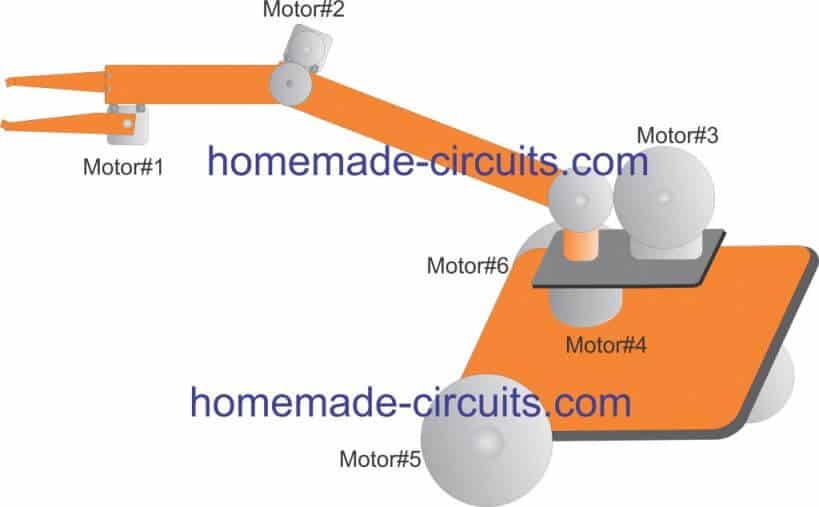
在这个设计中,我们确保事情尽可能简单,即使是一个外行也能理解有关电机/齿轮机制。在复杂的机制背后,没有什么是隐藏的。
通过以下几点可以了解各个电机的工作或功能:
- 电机1控制机器人的“手指按压”或抓取系统。活动元件与电机轴直接铰接以实现运动。
- 电机2控制系统的弯头机构。它配置了一个简单的边缘到egde齿轮系统,以实现提升运动。
- 电机3负责将整个机械臂系统垂直提升,因此该电机需要比上述两个电机更有力。该电机还集成使用齿轮机构交付所需的行动。
- 4号电机控制整个起重机机构在一个完整的360度水平面上,使手臂能够拾取或抬起任何物体顺时针或逆时针方向径向范围。
- 5号和6号发动机就像平台的轮子,承载着整个系统。这些电机可以通过将系统从一个地方移动到另一个不费力气,它也可以通过简单地调整左/右电机的速度来方便系统的东/西、北/南移动。这是简单地通过减少或停止两个电机之一,例如启动一个右转弯,右电机可能会停止或停止,直到转弯完全执行或到所需的角度。同样地,要开始左转,用左马达做同样的事。
后轮没有任何电机与它相关联,它是铰接在其中心轴上自由移动,并跟随前轮的动作。
无线接收电路
由于整个系统被设计为与远程控制一起工作,无线接收器需要配置上述解释的电机。这可以通过下面的Arduino电路来实现。

如您所见,Arduino输出附加了6个伺服电机,每个伺服电机都是通过附加的传感器NRF24L01捕捉到的遥控信号来控制的。
该传感器处理信号,并将其反馈给Arduino, Arduino将处理过程传递给相关的电机进行预期的速度控制操作。
信号从具有电位器的发射机电路发送出去。这些电位器上的调整控制与上述解释的接收电路相连的相应电机上的速度水平。
现在让我们看看发射机电路是什么样的:
发射机模块
![]()
可以看到,发射机设计有6个电位器与Arduino板,还与另一个2.4 GHz通信链路设备。
每个罐子都有相应的程序控制相应的电机与接收电路相关联。因此,当用户旋转选定的变送器电位器的轴时,机械臂相应的电机开始运动,并根据其在系统中的具体位置执行动作。
控制电机过载
你可能想知道电机是如何在它们的活动范围内限制它们的运动的,因为系统没有任何限制安排来防止电机在各自的机构运动到达终点时过载。
意思是,例如,如果电机没有停止,即使在“抓地力”紧紧抓住物体后,会发生什么?
最简单的解决方案是添加individual电流控制模块在这种情况下,电机保持开机和锁定,而不燃烧或过载。
由于主动电流控制,电机不通过过载或过电流条件,他们保持在指定的安全范围内运行。
可以找到完整的程序代码在这篇文章中

先生,我想设计一个可变直流电压源或电源来测试我的电路,但我没有或不知道电路。
请发给我。
Akinbi,在这个网站上有很多的设计,请使用搜索框找到它们
篇好文章。
如果可能,请分享视频。
当然,如果我成功了,我会把视频发布出来!
先生,感谢您的沟通。从你的项目10 Remote switch with nRF24l01获得动力,我尝试构建5套Remote switch双向使用arduino Uno和Nano在15米距离操作。工作正常,但经常在测试场所并排停止收发无线电信号/检查电源和硬件,没有问题。我不习惯代码。因此,我需要专业人士的帮助来解决这个问题。
最好的
9748740387
Subhasis,我理解你的问题,但是我没有Arduino这方面的专业知识,这个问题我很难解决。本网站所有Arduino文章均由外部作者贡献。
没问题,先生,如果不在这个范围内,我可以选择其他方式而不是arduino。但是我需要发送和接收5个双向输入。我想它一定有别的选择。我可以将此作为完整的解决方案,而无需进行故障排除。无论如何或被任何人。请. .
Subhasis, nrf24L01只能通过Arduino单片机操作,不能使用其他离散方法操作,所以解决方案仍然不在我的范围内。
顺便问一下,你看过集成电路的数据表了吗?它可能会帮助你解决你面临的问题
https://www.sparkfun.com/datasheets/Components/nRF24L01_prelim_prod_spec_1_2.pdf