
这篇文章全面详细地介绍了无刷直流电机(也称为BLDC电机)的基本工作原理。
有刷和无刷直流电机的区别
在我们传统的刷式电机中,电刷用于切换中心运动转子相对于周围的文具永磁定子。
电刷变得势在必行,因为转子是用电磁铁制造的,需要电力来运行,但由于它也需要旋转,东西变得笨拙,电刷成为唯一的替代供应电力的旋转电磁转子。
相反,在无刷直流电机或无刷直流电机中,我们有一个中心定子和一个环绕的圆形转子。定子由一组电磁铁组成,而转子则在其周长的特定计算位置上固定有永久磁铁。
使用霍尔效应传感器
机制也有一个霍尔效应传感器,安装在转子的位置和其对定子磁体电磁铁和通知数据到外部开关电路然后就负责激活/电磁铁在正确的顺序或时间,才会安静下来影响转子旋转运动的。
以上的解释可以通过下面的基本说明来理解,然后通过后续图片的精心设计来理解。
我们已经了解了很多关于磁铁和这些设备如何相互作用的有趣的事情。
我们知道磁体的北极吸引另一个磁体的南极,而同极相斥。
永磁体是如何定位的
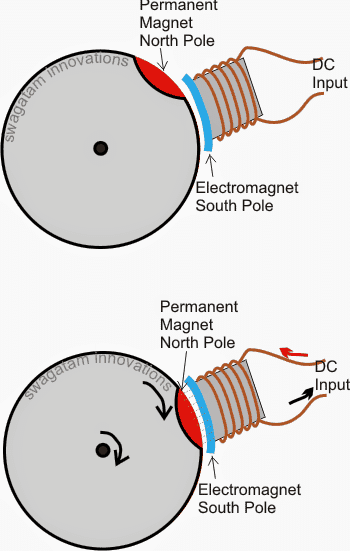
在上图中,我们看到一个圆盘边缘有一个嵌入的磁铁(显示为红色),北极朝外,还有一个电磁铁,平行靠近圆盘的圆形边缘,通电时产生南磁场。
现在假设排列的位置如上图所示,电磁铁处于失活状态。
在这个位置一旦电磁铁与合适的直流输入激活它达到和生成一个南在盘磁铁磁场影响拉力反过来迫使阀瓣旋转和扭矩,直到其永磁与对面的电磁铁的通量。
上述动作显示了BLDC概念工作的基本格式。
无刷直流电动机如何与霍尔效应传感器工作
现在,让我们看看如何实际实施上述概念,使用霍尔效应传感器,以维持转子上的连续运动。
下面的示例图全面解释了该机制:
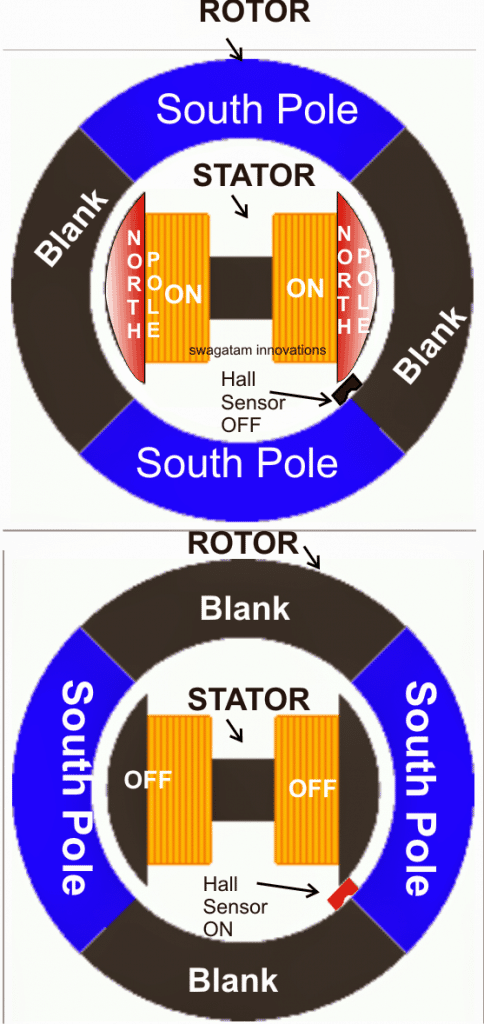
在上图中,我们基本上看到了一个简单的BLDC转子/定子布置,其中外圆元件为旋转转子,而中心电磁铁为固定定子。
转子可以看到有两个永久磁铁固定在南极的外围影响的通量,中央定子是强大的电磁铁旨在生成一个北极的等效强度与外部直流磁通时精力充沛。
我们也可以可视化霍尔传感器位于内部转子外围的一个角落。霍尔效应从根本上感知旋转转子的磁场,并将信号提供给负责为定子电磁铁供电的控制电路。
参考上面的位置,我们看到转子的空白区域(它没有任何磁场)与霍尔传感器紧密接触,使其处于关闭状态。
在这个瞬间,霍尔效应的开关关闭信号通知控制电路打开电磁铁,立即感应到一个拉力效应转子南极站在拐角处。
当这种情况发生时,南极急速下降,在转子上产生所需的扭矩,并试图将自己与电磁铁的北极对齐。
然而,在这个过程中,转子的南极也会靠近霍尔传感器(如下图所示),霍尔传感器会立即检测到这一点并打开,通知控制电路关闭电磁铁。
电磁铁的关闭时间至关重要
根据霍尔效应传感器发出的信号,在正确的时刻关闭电磁铁,可以防止失速和阻碍转子的运动,而是允许它通过所产生的扭矩继续运动,直到前一个位置开始成形。直到霍尔传感器再次“感觉”转子的空白区域,并被关闭,重复循环。
霍尔传感器根据不同的转子位置进行的上述切换产生了一个连续的旋转运动,其扭矩可能与定子/转子的磁相互作用成正比,当然还有霍尔效应定位。
以上讨论说明了最基本的两磁一霍尔传感器机制。
为了获得特别高的转矩,在其他更高效的无刷电机中使用了更多的磁铁和电磁铁组,其中可以看到多个霍尔效应传感器用于实现转子磁铁的多个传感,以便可以按照优选的正确顺序切换不同的电磁铁组。
如何控制无刷直流电机
到目前为止,我们已经了解了……的基本工作概念刷电机并学习了如何使用霍尔传感器通过外部连接的电子电路来激活电机的电磁铁,以保持转子的连续旋转运动,在下一节中,我们将研究无刷直流电机驱动电路如何实际工作来控制无刷直流电机
与传统的刷式电机相比,采用固定定子电磁铁和旋转自由磁转子的方法确保了无刷直流电动机的效率得到提高,而传统刷式电机的拓扑结构恰恰相反,因此需要刷来进行电机操作。使用刷子使程序在长寿命、消耗和尺寸方面相对低效。
无刷直流电动机的缺点
尽管BLDC类型可能是最有效的电机概念,但它有一个显著的缺点,即需要外部电子电路来操作它。然而,随着现代集成电路和灵敏霍尔传感器的出现,与这一概念所涉及的高效率相比,这个问题现在似乎微不足道。
四磁铁无刷直流驱动器的设计
在本文中,我们讨论了一个简单和基本的控制电路的四磁铁,单霍尔传感器型无刷直流电机。电机的运行可参考以下电机机构图理解:
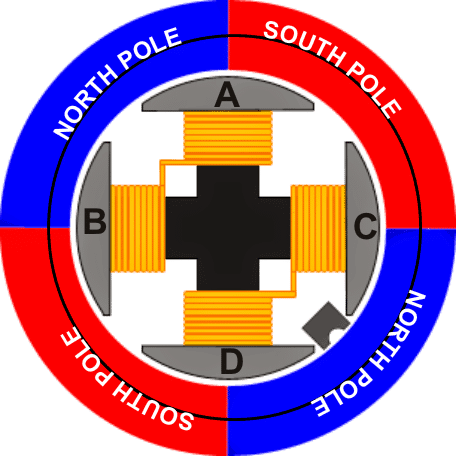
上面的图像显示了一个基本的无刷直流电动机的安排有两组永久磁铁跨越外围的外部转子和两组中心电磁铁(a,B,C,D)作为定子。
为了启动和维持一个旋转扭矩,a, B或C, D电磁铁必须处于激活状态(决不在一起),这取决于转子磁铁的北极/南极相对于激活电磁铁的位置。
无刷直流电动机驱动器的工作原理
准确地说,让我们假设上述场景中所示的位置,A和B处于接通状态,这样A侧与南极通电,B侧与北极通电。
这意味着A侧将对其左侧蓝色北极施加拉力效应,对其右侧定子南极施加排斥效应,类似地,B侧将拉动较低的红色南极,并排斥转子的较高北极……然后可以假设整个过程将在转子机构上施加令人印象深刻的顺时针运动。
我们还假设在上述情况下,霍尔传感器处于停用状态,因为它可能是“南极激活”霍尔传感器设备。
上述效应会尽量对齐,并迫使转子,南面对一边锁B在北极的一面,然而在这种情况下能够发生带来的霍尔传感器是在靠近南极转移上的转子,当它刚刚通过霍尔传感器时,它被迫打开,向连接的控制电路发送一个积极的信号,该电路立即响应并关闭电磁铁a /B,打开电磁铁C/D,确保转子的顺时针力矩再次被强制保持转子上的一致转动力矩。
基本无刷直流电驱动电路
上述电磁铁响应霍尔传感器触发信号的切换可以使用以下简单的BLDC控制电路思想非常简单地实现。
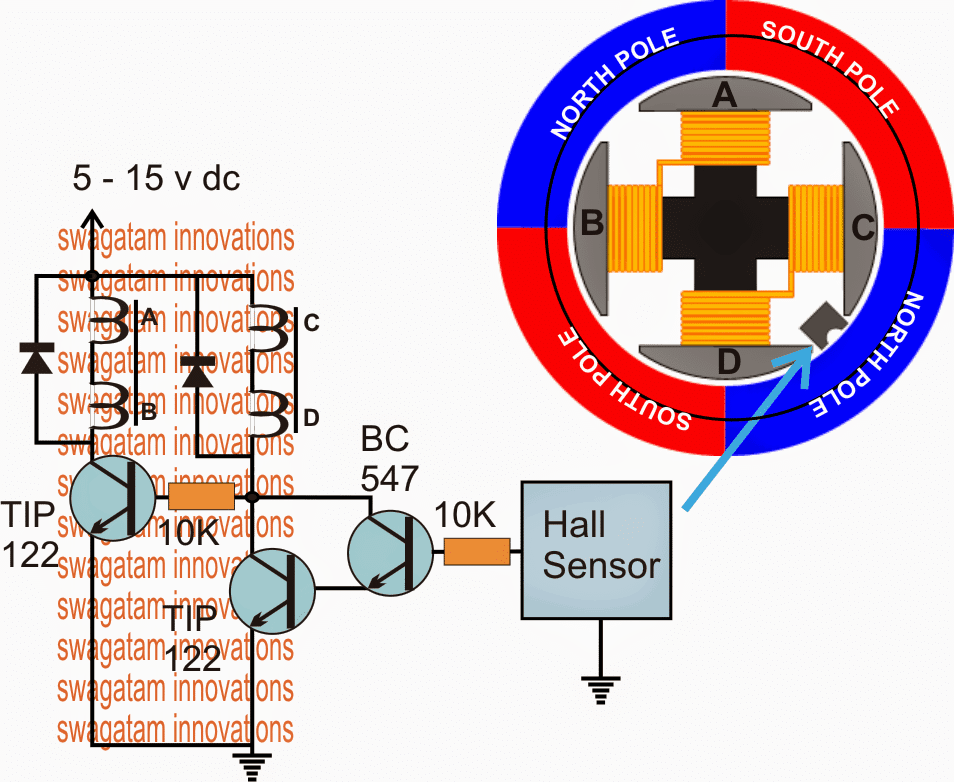
电路不需要太多的解释也基本以来,在霍尔传感器的开关情况,BC547和耦合TIP122相应开启进而打开对应的电磁铁附加在他们收集器和积极,在大厅的关闭时间传感器,BC547/TIP122对被开关为OFF,但最左边的TIP122晶体管被开关为ON,激活相反的电磁铁组。
这种情况是交替切换的,持续的,只要仍有动力,保持无刷直流电机以所需的扭矩和动量旋转。
各自的先生,这个控制器适用于48伏750瓦的自行车轮毂电机,请告诉我
Shuddhatam,上述电路不适用于48V ebike电机,您可能必须采用以下设计之一:
//www.addme-blog.com/?s=BLDC
你好,Swagatam先生,非常感谢这个伟大的帖子。
当需要3000g左右的推力时,您推荐使用哪种无刷电机?非常感谢。
嗨,Peter,不好意思,我不是很确定,因为这可能需要一些计算
你好,谢谢